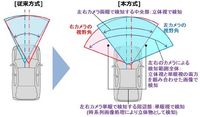
従来方式と本方式によるステレオカメラの検知範囲の違い
日立オートモティブシステムズは、カメラ単体で交差点での衝突被害軽減ブレーキへの対応と、遠方検知を両立したステレオカメラを開発したと発表した。
今回開発したステレオカメラは、ステレオカメラの左右の視野角を従来よりも広角化するとともにし、左右のカメラで検知する画像範囲を左右にずらす方式を採用することで、検知範囲を拡大した。これによってセンシング画素数を増やすことなくアダプティブクルーズコントロール(ACC)機能に対応できる遠方検知を維持しながら、交差点右左折時、歩行者などとの衝突被害軽減ブレーキを可能とする従来比約3倍の広画角化を実現した。
開発したステレオカメラは中央部の両眼による立体視検知と、周辺部の時系列画像処理での単眼による立体物検知をつなぎ、予めAI(人工知能)の機械学習の手法で識別パターンを記憶させることによって高精度で歩行者や自転車を検知して距離を測定する。
交差点での右左折時、衝突する可能性のある歩行者などを検出するには、広い水平画角をセンシングする技術が必要となる。また、センサーの要件として、遠方の先行車を検知し続けるには通常、カメラのセンシング素子であるCMOSの高画素化や、ミリ波レーダーなどのセンサーを組み合わせる必要があり、コストアップ要因となる。
今回開発したステレオカメラは、遠方検知と交差点での衝突被害軽減ブレーキが可能となる広い画角をステレオカメラ単体で両立した。